
地下駐車場など、GPSが利用できない場所での自動車の高精度自己位置推定の実証実験を行いました。
カーナビゲーションや自動運転システムなど、自己位置を推定することは、自動車にとって重要な基礎技術になっています。ただし、トンネルや屋内駐車場などGPSを利用できない屋内空間においては、必要とされる精度の位置を推定することは大変難しい課題です。
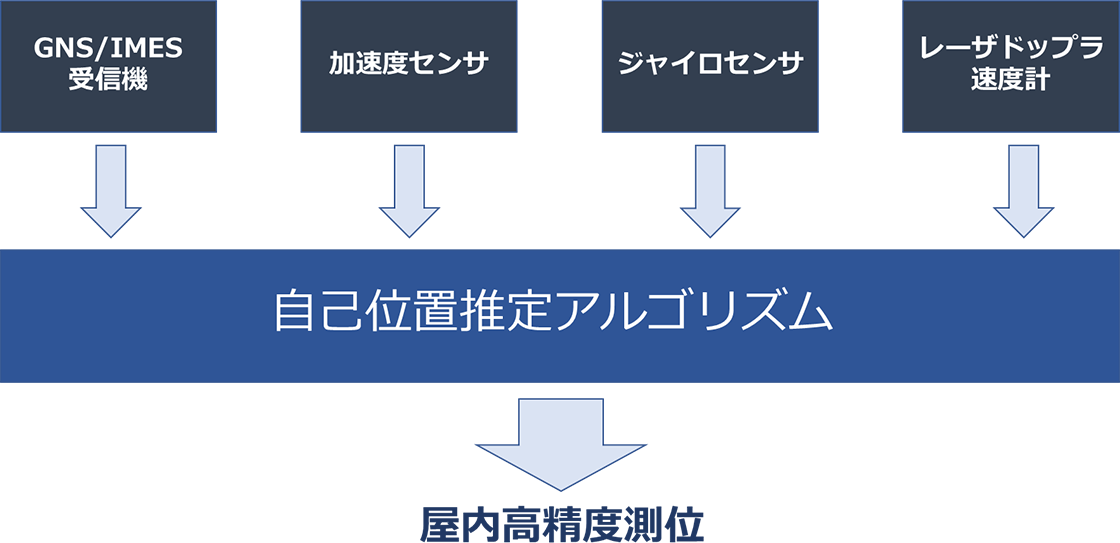
この課題を解決すべく、IMES、加速度センサ、ジャイロセンサ、レーザドップラ速度計という複数のセンサーデータを、イネーブラー独自のアルゴリズムで融合する実証実験を、国内大手SIer様と共同で実施しました。
加速度センサやジャイロセンサを用いた、自己位置推定はデッドレコニング(DR/自律航法)と呼ばれる技術ですが、ジャイロセンサのドリフト、加速度の累積誤差により、長時間の自律航法は大きな精度劣化につながります。
デッドレコニングを長時間高精度化するために、一般的にはジャイロセンサのドリフトを軽減するアプローチを取りますが、弊社は自動車においては、加速度の累積誤差が支配的という仮定をたて、レーザドップラ速度計を用いた、加速度センサの誤差推定モデルを開発しました。
実証実験で、GPS測位ができない屋内駐車場で、自動車を蛇行運転しながら周回し、スタート地点とゴール地点での誤差を計測した結果、1分の走行で誤差30cm以内という結果を得ることができました。
この時使用した、加速度センサおよびジャイロセンサは安価なMEMSセンサを用いたのも特筆です。
この技術は、自動車だけでなくフォークリフトなど産業用車両への応用も可能であり、継続して研究をしております。